
WAR MACHINE - Autonomous humanoid robot
PROJECTS
7/1/20255 min read
Vision
Meet War Machine, my compact humanoid built to feel present in the room. At 55 cm and 5–6 kg, with the idea of being upgraded to 1 m, he navigates spaces, maps obstacles, and reacts to what he sees. He speaks, understands simple commands, and moves with range: walking, running, push-ups, light boxing drills, and dance routines. His “armaments” are safe, movie-style effects: lights, sounds, and motion props for show, not harm. The aim is a confident, expressive robot that blends performance, utility, and safety.
System at a glance
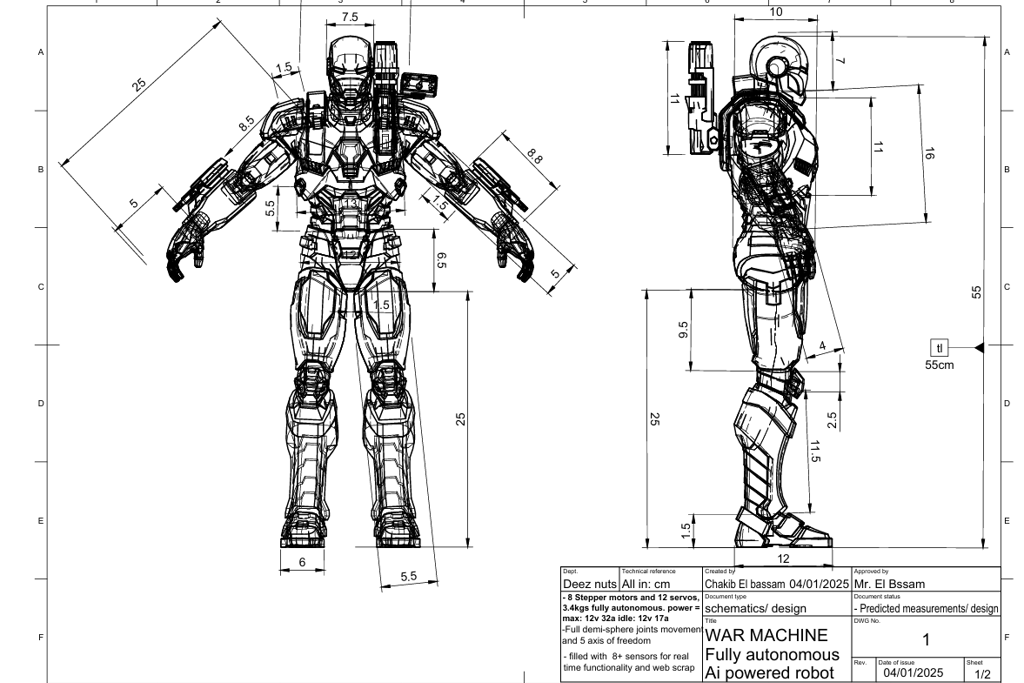
Form factor: ~55 cm overall height; modular torso (hip/abs/chest), single arm + head; target mass ~5.5–6.0 kg (latest calc).
Actuation: Mixed-servo design. Hip driven by a high-torque servo with 2:1 reduction; knee uses an MG996R with an ~8–12:1 harmonic/gear stage; shoulder joints use MG996R with 2:1; elbow ~1.5:1; wrist direct 9 g servo.
Available torque (post-reduction): Hip ≈ 7.8 N·m; Knee ≈ 10–12 N·m; Shoulder ≈ ~4–7.8 N·m; Elbow ≈ ~1.5 N·m.
Compute: Nvidia Jetson Nano + microcontroller stack for hard real-time loops; sensor bus for IMU, ToF/LiDAR, camera, current/voltage, and bump sensing.
Power: 3S 18650 pack (12–18 cells), 10–15 Ah equivalent; swappable sled; fused rails and per-group current limiting.
Duty profile (simulated): 10 m walk ≈ ~40 s, pick 300 g, 10 m return ≈ ~40 s approximately in total ~90 s, ~75 mAh consumed per cycle at ~3 A average.
Runtime envelope: Standby 10–20 h; moderate 4–7 h; heavy 2.5–3.5 h (est.).
Safety: Current limiting, soft-start, e-stop loop, joint software travel limits, “limp” mode, and staged torque ramp.
(Numbers above come from my current sizing notes and joint/battery calculations.)
Mechanical architecture
Chassis & proportions
The design locks to a 55 cm height envelope with a compact hip block and a slender abs/chest stack to concentrate mass around the CoM. Leg segments are ~25 cm each; hip block ~6.5 × 12 × 7 cm; abs ~5.5 × 12 × 8 cm (batteries live here); chest ~11 × 13 × 10 cm (compute, power distro). Arms total ~25 cm reach; head ~7 × 7 cm to house camera and pan/tilt. Materials are a mix of 3D-printed PETG/ABS, aluminum standoffs, and small steel inserts where stiffness matters.
Loads & joints
Back-of-envelope torque budgets set hip requirement ≈ 6 N·m (leg load ≈ 2.5 kg at ~0.25 m lever), so the 2:1 reduction on a 40 kg·cm class servo yields ~7.8 N·m, leaving margin for stance and push-off. Knee sees ~4 N·m required; with an ~10–12:1 stage on an MG996R we get ~10–12 N·m—comfortable for controlled gait and gentle crouch. Shoulders target light manipulation (<300 g at ~20 cm): ~0.6 N·m; with 2:1 we’re several times above that.
Gearing strategy
I’m using modest gear ratios to keep speed workable and avoid stalling. Where space permits, I prefer belt/gear combos with inexpensive harmonic-style reduction on knees. Shoulder/elbow use printed housings with brass inserts to keep backlash low.
Actuation & control
Servo ecology
Hip pitch: 40 kg-class servo @ 2:1
Knee: MG996R + ~8–12:1 reduction
Shoulder (pitch/yaw/roll): MG996R @ 2:1
Elbow: MG996R @ 1.5:1
Wrist: 9 g servo, direct
Low-level loops
A dedicated MCU runs 1 kHz joint PID with feed-forward and gentle slew rate limits. The Pi handles state estimation (IMU fusion), gait phase, and higher-level behavior. I’m targeting simple ZMP-lite balancing plus a foot-placement planner for straight-line walking at 0.2–0.25 m/s to start.
Perception & compute
Head: camera on 2-axis mount for visual servoing and fiducials;
Body: 6-DoF/9-DoF IMU, ToF/LiDAR for near-field awareness, bump strips around the shins;
Compute tiering: Pi for vision/planning/UI; MCU(s) for hard-real-time motor control; i2c/SPI bus guardians; watchdogs on both tiers.
Power, thermals, and safety
Battery: modular 3S sled (12–18 × 18650), 10–15 Ah.
Distribution: fused rails, buck modules for logic, isolated feeds for high-current servo groups.
Thermals: airflow paths in chest, heat-sinking on regulators, temp telemetry.
Safety: physical E-stop, software torque caps, joint travel limits, “limp” mode (power-down to safe stance), brownout recovery.
What the math says (so far)
10 m walk at ~0.25 m/s ≈ ~40 s per leg with ~6 N·m hip requirement—meets spec with 2:1 gear.
Pick & place 300 g at 20 cm reach ≈ 0.6 N·m at shoulder—well within capacity.
Energy per full “walk-pick-walk-place” cycle: ~75 mAh at ~3 A average.
Heavy use runtime (continuous gait + arm work): ~2.5–3.5 h on a 10 Ah pack; moderate ~4–7 h depending on duty cycle.
These numbers give me confidence that a demo loop (walk → pick 300 g → return) is realistic without cooking the batteries or the joints.
Interaction modes
Autonomous demo: straight-line walk, locate bin fiducial, pick 300 g, return and place.
Teleop: web UI over Wi-Fi for joint jogs and waypoints (with soft limits).
Scripted routines: YAML “skills” (stand, wave, pick, place) chained into routines.
Safety first: any fault trips limp mode and waits for operator reset.
What’s built today
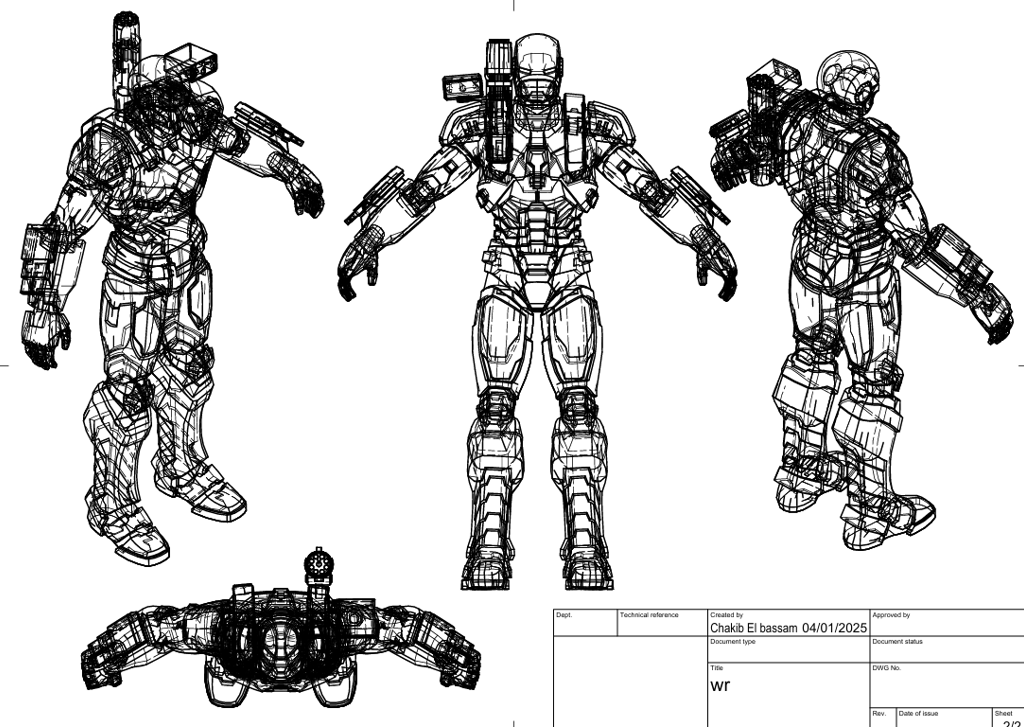
Mechanical: lower-torso frame, a functional prototype arm, gear test rigs, and dimensioned drawings for the full stack; iteration fixtures for the knee reducer and shoulder cartridge.
Electrical: early power distro board with fused rails; buck modules validated; battery sled design; bench harness for current logging.
Software: joint PID on MCU with slew limiting; basic gait phase machine; teleop sandbox; logging pipeline.
Design data: consolidated specs (joint torques, gear ratios, energy model), mass budget per module, and initial walking/pick-place timing.
What’s next
Leg v1 assembly (hip/knee/ankle), tune stance controller, and capture current vs. load curves.
Battery sled v1 (12-cell) and safe charge/discharge workflow; integrate live current/voltage telemetry.
Gait bring-up on flat ground; add foot contact sensing for phase confirmation.
Arm integration with pick-place skill; start simple graspers (rubberized two-finger).
Safety hardening: e-stop, watchdogs, and fault-tolerant limp posture.
Stretch goals
Two-arm variant with coordinated manipulation.
Vision-guided pick (AprilTag/fiducials) and basic obstacle avoidance.
Voice/gesture teleop layer for fun demos.
Reflections
This project sits at the edge of my current capabilities by design. The sizing work (torque, gearing, energy, heat), the wiring discipline, and the control loops are where most of the learning lives. I’m deliberately keeping velocities and payloads modest while I prove the stack. From there, it’s iteration: stiffer joints, cleaner harnessing, and smarter gait.
Gallery / Docs (live as I build)
Dimensioned drawings & envelope sketches
Module CAD (hip block, knee reducer, shoulder cartridge)
Power distro + battery sled
Bench tests (current vs. load, thermal)
Gait and pick-place video logs
If you want the gritty details (torque tables, gear ratios, battery math, and timing budgets), I’ve consolidated them into the project spec and drawings. Happy to share those alongside progress clips.
Connect
Explore innovative AI solutions to grow your business today.
Feel more than welcomed to contact me on any platform.
Subscribe to get the latest news/deals
© 2025. All rights reserved.

Privacy Policies